Our research is focused on autonomous satellite navigation near unknown and uncooperative targets – meaning there isn’t a prior 3D model to use as a reference and the target isn’t transmitting a known signal or otherwise assisting in the process. We’re specifically looking at the case where the target is a man-made object like a satellite or piece of space debris; so the potential applications include satellite maintenance, debris removal or even orbital manufacturing.
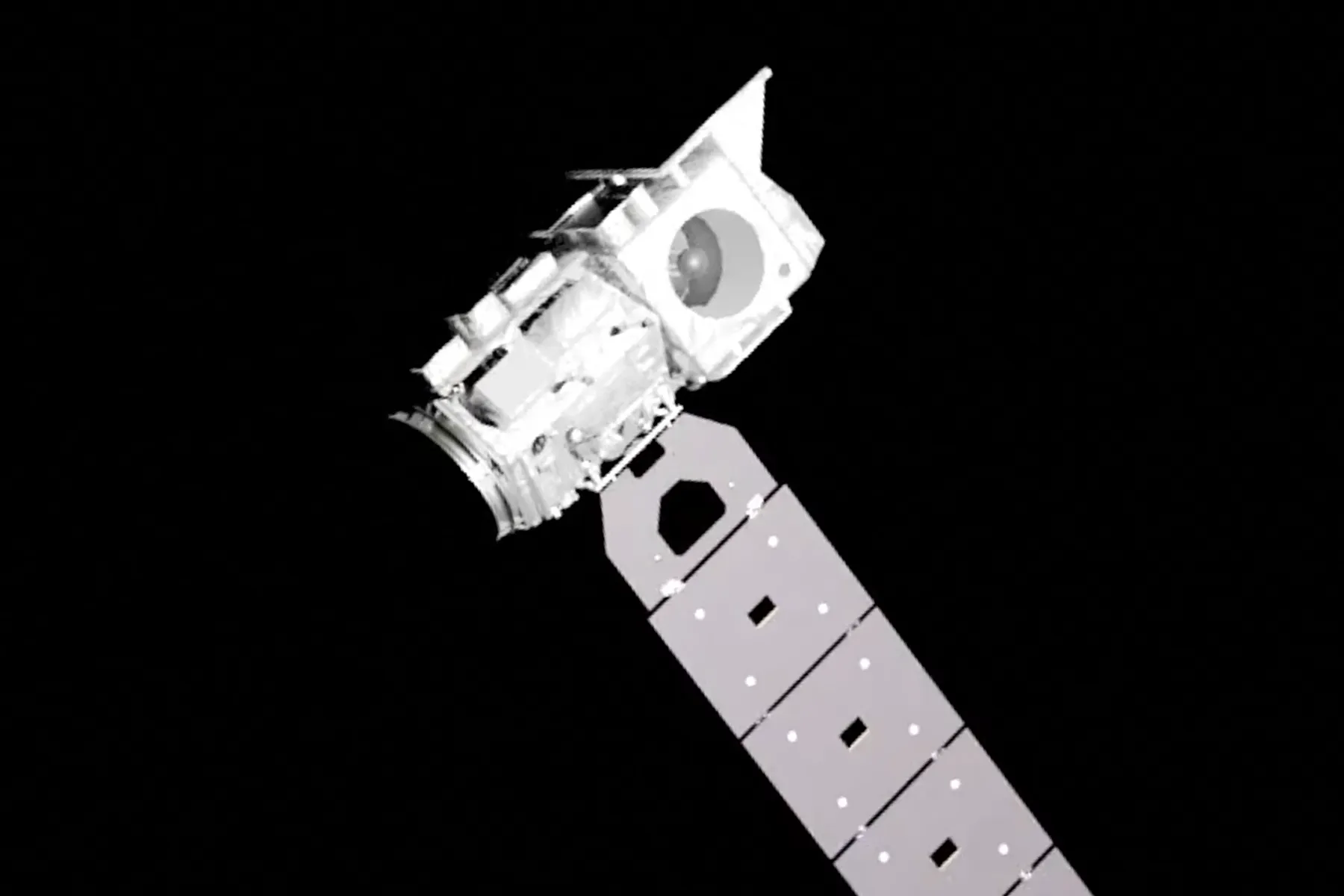
The aim is to use optical images taken by a ‘chaser’ satellite to reconstruct the target’s geometry and dynamics in real-time, gradually deriving information as the chaser approaches and more details are visible in the images. This can begin when the target is just a single pixel – by analysing how the brightness of that pixel varies over time you can determine the spin rate. With tens of pixels you can find the spin axis and a basic shape. We’re primarily working on the next stage of the problem, which starts at ~100m separation for a small satellite. The algorithm picks out distinctive features in each image (eg. corners of a solar panel) and tracks them over time. When combined with other observations about the motion of the chaser and target, this can tell you where each feature is in 3D space. By doing this for hundreds of features you can fully model the target’s surface and derive physical properties such as angular velocity, moment of inertia and centre of mass.
Story Insights
- Advanced Satellite Operations: Our research potentially transforms space operations, enabling us to extend the use of satellites by maintaining or repairing them, removing debris and even manufacturing in orbit.
- Detailed Space Object Analysis: As the technology can derive physical properties like spin speed, resistance to changes in rotation, and center of mass from a distance, it holds a lot of potentials, not just for known satellites and debris, but discovering and studying new objects in space as well.
- Safe Space Exploration: Autonomously navigating around unknown objects reduces risks associated with manual controls or pre-calculated paths. This makes space safer for exploration and commercial activities.
- Real-time Monitoring: The technology allows real-time, detailed monitoring of space objects, giving valuable live updates of state changes, potential collisions, and anomalies.
- As for applications on Earth, while our research directly impacts space operations, considering the nature of our work in image analysis, 3D modeling, and real-time tracking, the methodologies and algorithms we are developing could indirectly inspire advancements in related Earth images and targeting based fields.